














วันที่ 23 มิถุนายน 2566 เวลา 10.30 น. ศาสตราจารย์ ดร.สมฤกษ์ จันทรอัมพร รองอธิการบดีฝ่ายวิจัยและพัฒนาเทคโนโลยีสารสนเทศ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าพระนครเหนือ (มจพ.) ส่งมอบ “ยานใต้น้ำไร้คนขับเพื่อตรวจสอบแผงผลิตไฟฟ้าลอยน้ำ” ให้แก่คุณประเวทย์ เกิดวัดท่า ผู้อำนวยการฝ่ายบำรุงรักษาเครื่องกล การไฟฟ้าฝ่ายผลิตแห่งประเทศไทย (กฟผ.) เป็นผู้รับมอบ ณ ห้องประชุมวิจิตรวาที ชั้น 3 อาคาร 81 คณะวิศวกรรมศาสตร์ มจพ.
ยานใต้น้ำไร้คนขับตรวจสอบแผงผลิตไฟฟ้าลอยน้ำ เป็นความร่วมมือวิจัยและพัฒนาระหว่างคณะวิศวกรรมศาสตร์ มจพ. กับการไฟฟ้าฝ่ายผลิตแห่งประเทศไทย โดยมีรองศาสตราจารย์ ดร.รามิล เกศวรกุล ภาควิชาวิศวกรรมการผลิตและหุ่นยนต์ คณะวิศวกรรมศาสตร์ เป็นหัวหน้าโครงการ เป็นผลงานวิจัย สิ่งประดิษฐ์และนวัตกรรมที่ช่วยเหลือ ลดความเสี่ยงในการปฏิบัติงานใต้น้ำของนักประดาน้ำ ลดต้นทุนในการบำรุงรักษาแผงผลิตไฟฟ้าลอยน้ำ โดยนำเทคโนโลยีการประมวลผลภาพประเภทตัวกรองสัญญาณมาประยุกต์ใช้ในการตรวจสอบและประเมินความเสียหายเบื้องต้นได้
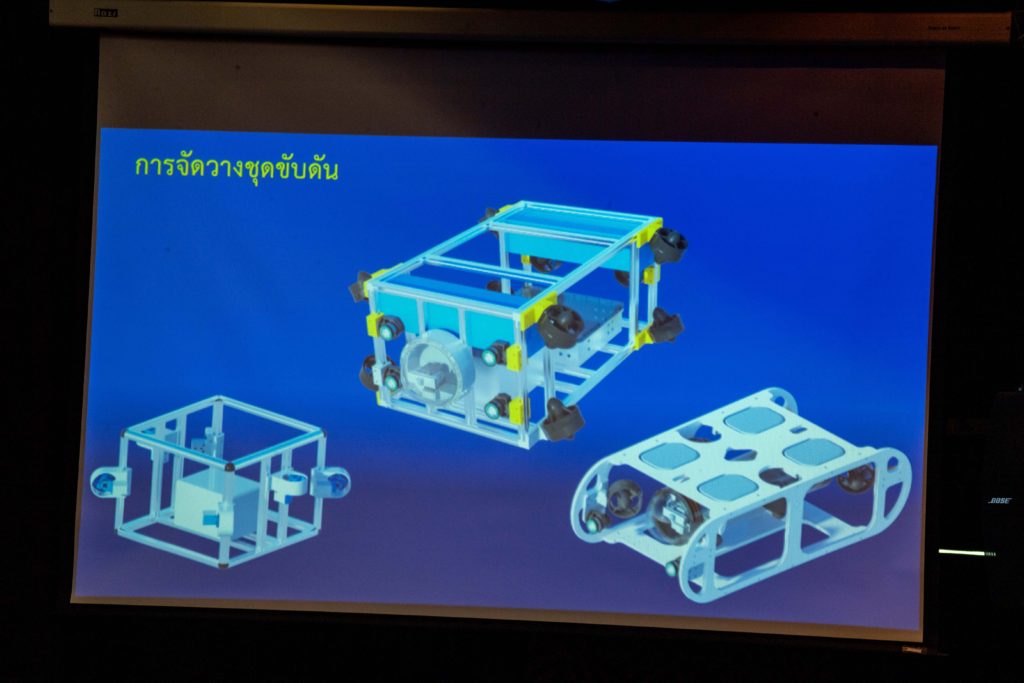
การทำงานของยานใต้น้ำสามารถตรวจสอบสภาพทุ่นลอยน้ำ ทุ่นใต้น้ำของแผงผลิตไฟฟ้าได้ มีการประยุกต์ใช้เทคโนโลยีการประมวลผลภาพประเภทตัวกรองสัญญาณ ตรวจสอบ ประเมินความเสียหายเบื้องต้นได้ การวางชุดขับดันแบบตัดขวางทแยงมุม ทำให้ยานเคลื่อนที่ได้อย่างอิสระ ระยะทางในการสำรวจสูงสุดแบบมีสายสัญญาณที่ 250 เมตร การสำรวจสูงสุดแบบไร้สายสัญญาณที่ 500 เมตร ยานใต้น้ำไร้คนขับ ติดตั้งระบบกำหนดตำแหน่งบนโลก (USBL-Seatrac X150 และ X010) ตรวจจับระยะด้วยเสียง (Multibeam sensor- Blueprint Subsea รุ่น Oculus M750D) ตรวจจับความเร็วใต้น้ำ (DVL–A50) ขับเคลื่อนระยะไกล ถ่ายทอดภาพขณะปฏิบัติงานใต้น้ำแบบใช้สายสัญญาณได้โดยมีระบบไฟส่องสว่างใต้น้ำ พร้อมทั้งทดสอบระบบการทำงานแบบไร้สายสัญญาณใต้น้ำของยานใต้น้ำ
การซ่อมบำรุงแผงผลิตไฟฟ้า จำเป็นต้องใช้นักประดาน้ำไปยังจุดที่ต้องการเฝ้าระวัง การลงไปปฏิบัติงาน เกิดความเสี่ยงต่อนักประดาน้ำสูงมาก หากเกิดเหตุฉุกเฉินต้องขึ้นมาบนผิวน้ำโดยด่วน นักประดาน้ำอยู่ในตำแหน่งใต้แผงผลิตไฟฟ้า จะออกมาได้อย่างทันท่วงที รวมทั้งการเข้าไปยังจุดต่าง ๆ หากใช้ยานขนาดใหญ่เข้าไปยังจุดสำรวจมีข้อจำกัด ก่อให้เกิดปัญหาในการเคลื่อนที่ ดังนั้น การนำเอาเทคโนโลยีมาช่วย สามารถลดเวลา ลดความเสี่ยงในการปฏิบัติงาน รวมทั้งเป็นการเพิ่มประสิทธิภาพกระบวนการทำงานอย่างเป็นรูปธรรมได้ โดยใช้เทคโนโลยีหุ่นยนต์ (ยานใต้น้ำไร้คนขับ) ลงไปทำการสำรวจแทนมนุษย์ หุ่นยนต์สามารถปฏิบัติงานได้โดยผ่านการควบคุมจากสายส่งสัญญาณ ถ่ายทอดภาพขณะปฏิบัติงานผ่านกล้องที่ติดอยู่ที่ตัวหุ่นยนต์ ช่วยในการควบคุม และวางแผนในการซ่อมบำรุงต่อไปได้อย่างมีประสิทธิภาพ
สามาถติดตามรูปภาพเพิ่มเติมได้ที่ : http://kmutnbgallery.quickconnect.to/mo/sharing/Lbg0K6xtC
0 Comments